近日,同济大学交通运输工程学院杜豫川教授为第一作者,刘成龙为通信作者,宋阳、李亦舜、沈煜等为共同完成作者,在智能交通系统顶级期刊IEEE Transactions on Intelligent Transportation Systems (21卷 , 2020年)上发表题为:Rapid Estimation of Road Friction for Anti-Skid Autonomous Driving的文章,详细介绍了一种基于机器视觉的路面抗滑性快速评估方法。
背景介绍:
泛研究和测试认为网联自动驾驶汽车(CAV)是一种近未来的运输系统。稳定的自动驾驶需要对环境参数的精确把握,部分参数仅需离线识别,例如道路结构,信号周期和基础设施;其它信息则需要实时检测。
传统抗滑性能的检测方法已难以满足自动驾驶提出的高效率、高精度实时采集要求。目前用于测量抗滑性的设备,可以分为两种类型:摩擦测量设备和纹理测量设备。基于摩擦的设备可以直接测量摩擦或制动力,包括加利福尼亚便携式滑行测试仪,英国摆锤测试仪,阻力测试仪和锁轮滑行拖车。基于纹理的设备通过测量道路纹理的深度来计算防滑性。例如体积“沙斑”测试,圆形轨迹仪以及更先进的设备,例如高速纹理激光器。这些设备中的大多数设备比较耗时,并且基于点进行测量,加之设备价格昂贵,例如毫米级激光器,因此不适合应用于网联自动驾驶汽车进行检测。此外,这些方法只能定期测量摩擦,难以适应交通流状态下动态变化的抗滑性能。
论文摘要:
出了一种基于机器视觉的路面抗滑性能快速评估方法,并考虑了跟车与转弯等不同场景,应用于自动驾驶车辆的安全车速控制上。创新性地提出了一种基于多阶纹理特征“领域知识”的混合深度卷积神经网络,有效提高了抗滑性能预估精度,解决了大范围路面抗滑等级动态感知与车辆安全控制的难题。
Part 1:
在本文中,通过路面摆值(BPN)来量化道路防滑性能,该数字是使用便携式钟摆测试仪测得的公认指标。通过计算摆的摆动高度即可方便地测量BPN,该摆动高度指示了由于摆与道路之间的摩擦而导致的动能损失,摆的高度越低,防滑性能越好。在研究过程中,进行了100组现场测试,在每组中收集10张图像。
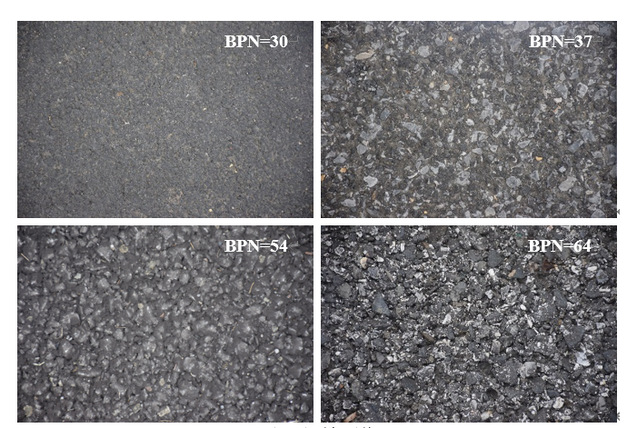
图1 原始收集图像
Part 2:
接着,基于车载摄像机收集的高质量图像,使用了两种计算机视觉方法(纹理识别和深度神经网络)来建立图像模式与道路抗滑性之间的关系。(1)纹理识别,包括灰度增强的局部二值模式和灰度梯度共生矩阵; (2)基于领域知识的深度神经网络(TLDKNet)。为模型训练引入了两种分类标准,并提出了三个指标(低估误差,高估误差和准确率)来验证算法的性能。结果表明,路面纹理与防滑性能之间存在很大的相关性。TLDKNet以90.67%的精度和仅2.67%的低估误差显示出最佳预测效果。
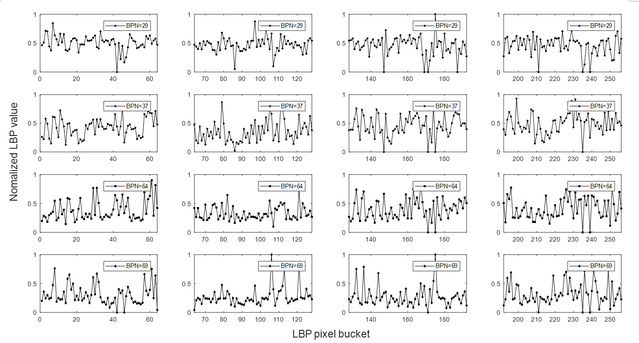
图2 路面不同BPN下的标准化局部二值特征
Part 3:
最后,考虑到制动和转向的自动驾驶场景,提出了一种基于双曲正切的速度控制策略和防滑驱动控制器,以避免打滑和追尾碰撞。采用基于领域知识的深度学习方法来检测路面的摩擦水平,然后使用已知的轮胎滚动阻力评估轮胎-道路摩擦力,并通过所给方法和模型计算路面防滑性。
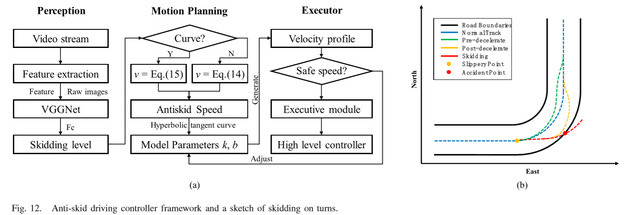
图3 基于转弯场景的抗滑驾驶控制器构架


 咨询电话:02169583810
咨询电话:02169583810 邮箱:
邮箱: